シミュレーションの演習
GS7:位置フィードバックのある油圧サーボモータ
 この例題はGS2と同じです。ただし、[1]ではGS2はボンドグラフとブロック線図との表現の違いに重点が置かれ、GS7ではサーボモータの説明に重点がおかれています。しかし、ボンドグラフには位置フィードバックがありますが、実際のシミュレーションはGS2と同じで位置フィードバックがない場合を取り扱っています。TUTSIMのコードも形式は違いますが、実質的には同じです。ここでは、同じシミュレーションをしてもしようがないので、位置フィードバックのある場合のシミュレーションを行うことにします。
この例題はGS2と同じです。ただし、[1]ではGS2はボンドグラフとブロック線図との表現の違いに重点が置かれ、GS7ではサーボモータの説明に重点がおかれています。しかし、ボンドグラフには位置フィードバックがありますが、実際のシミュレーションはGS2と同じで位置フィードバックがない場合を取り扱っています。TUTSIMのコードも形式は違いますが、実質的には同じです。ここでは、同じシミュレーションをしてもしようがないので、位置フィードバックのある場合のシミュレーションを行うことにします。
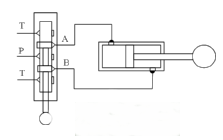
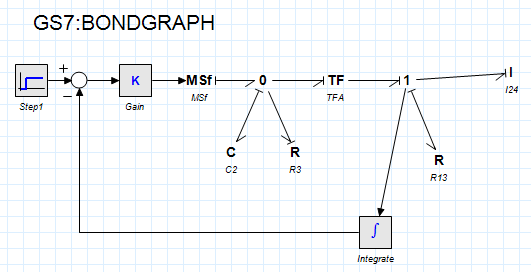
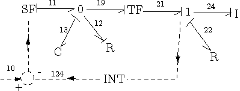 位置フィードバックのある場合のボンドグラフを左図に示します。ピストンI24のフローは速度ですから、そのディスプレースメントは位置になります。このボンドグラフでは速度を積分する表現としていますが、これは[1]がTUTSIMでプログラムすることを前提としているためで、BGSPではディスプレースメントを直接取り出せます。
位置フィードバックのある場合のボンドグラフを左図に示します。ピストンI24のフローは速度ですから、そのディスプレースメントは位置になります。このボンドグラフでは速度を積分する表現としていますが、これは[1]がTUTSIMでプログラムすることを前提としているためで、BGSPではディスプレースメントを直接取り出せます。
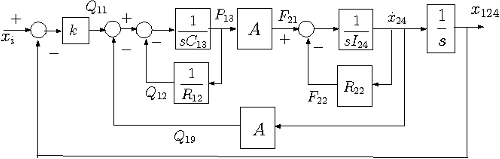
入力信号10との差をとり、アンプゲインkを掛けて、供給流量源SF11の信号とします。ボンド11から19までのエフォートは圧力Pを表します。この圧力とは模式図のA点とB点の圧力差を示します。
R12は外部の漏れ流量と下流側との圧力差により生じる減少流量との両方を表します。C13はバルブとラムの間にあるオイルの圧縮性を表します。
このサーボ弁の負荷は質量I24であり、シリンダとピストンロッド間の摩擦はR22で表されます。このボンドグラフは簡単に表現していますが、スプール弁とピストンの各部圧力まで詳細にボンドグラフで記述することはもちろん可能です。
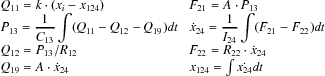
定式化
記号と式は次のようになります。

ブロック線図
ブロック線図は下図のようになります。これはGS2に位置フィードバックを付け加えただけです。ボンドグラフ表示がいかに簡潔かがわかります。全体の形は3次系となります。
シミュレーション結果
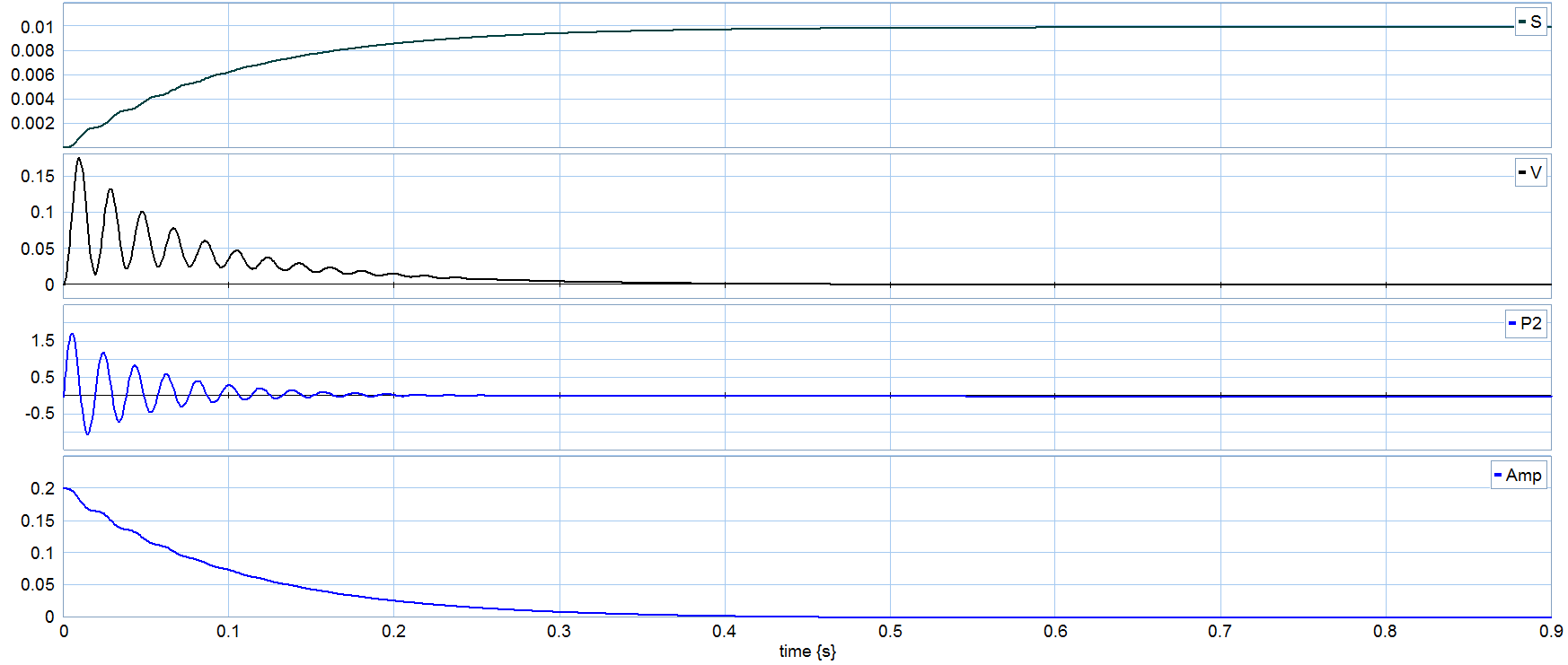
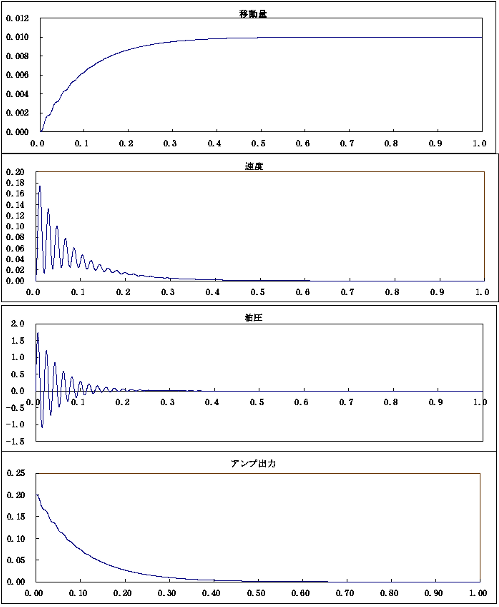
入力がステップ状であるとしたときのシミュレーション結果を下に示します。アンプゲインを20としています。そのほかのパラメーターはGS2と同じです。
20-Simによるシミュレーション
20-Simによる場合のボンドグラフを次に示します。I24のディスプレースメントは"1"接点からアクティブボンドを引出し、積分することにより得ることができます。アンプゲインK=20、入力位置信号:0.01とします。
20-Simによるシミュレーション結果
シミュレーション結果は下図のとおりです。当然ですが、BGSPの結果と一致します。結果が少し見難いですが、これは4プロットをまとめたためですので、切り離して大きく見ることも出来ます。