シミュレーションの演習
GS8:油圧伝動装置
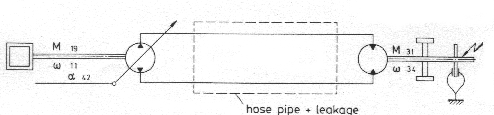
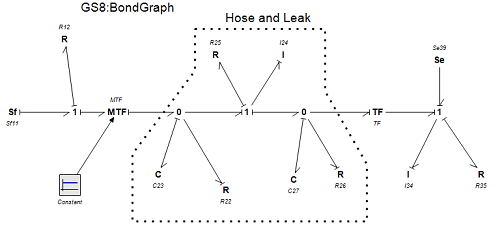
上の図は油圧伝動装置の模式図です。左の2重の![]() は油圧機械の原動力となるモータもしくは原動機です。原動機には可変押しのけ容積のポンプが接続されています。ポンプから押し出されるオイルはホースを経て油圧モータに供給され、負荷である慣性体と摩擦を駆動します。この模式図のボンドグラフは下の図のようになります。
は油圧機械の原動力となるモータもしくは原動機です。原動機には可変押しのけ容積のポンプが接続されています。ポンプから押し出されるオイルはホースを経て油圧モータに供給され、負荷である慣性体と摩擦を駆動します。この模式図のボンドグラフは下の図のようになります。
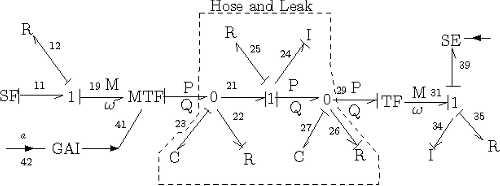
上の図において可変押しのけ容積のポンプの制御はにより、可変トランスフォーマにより行われます。全効率は滑り効率(体積効率)と引きずり効率(機械効率)の積であり、R12とR22の値により決められます。R12によりトルクはSFによる初期トルクから低下して、機械効率が決定され、R22によりリークが生じてQは減少しますから体積効率が決まります。
ゴムホースの抵抗はR25により、流体の質量はI24で代表されます。本来はこのゴムホース回路は分布定数系ですが、ここでは破線内の集中定数系で表現します。I34は負荷となる慣性質量であり、R35は摩擦抵抗を表します。SE39は速度に関係しない力を示します。
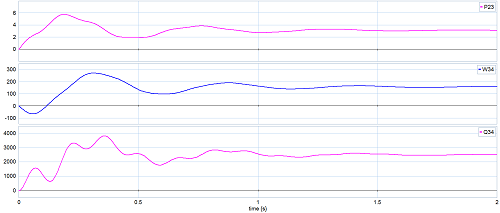
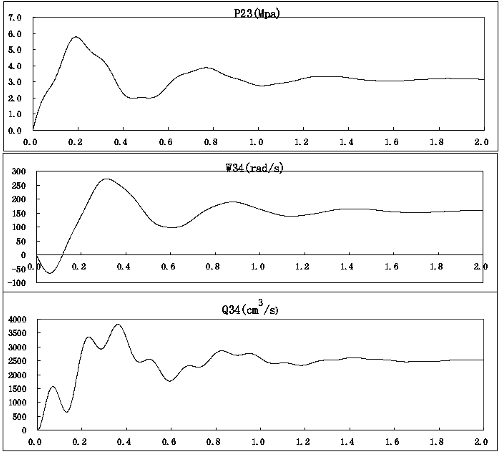
シミュレーションの結果
シミュレーションの結果を下図に示します。このボンドグラフではエネルギー貯蔵素子が4個あります(C23、I24、C27、I34)から4個の固有値と2個の共振点が予測されますが、シミュレーションの結果はある程度これを示すものです。
20-Simによるシミュレーション
20-Simによる場合のボンドグラフを下図に示します。注意点としては20-Simではボンドの向きは20-Simにより決められるので、右端の1接点からSE39へのボンドはSE39から1接点に向かうボンドになります。模式図から考えても、パワーはSE39に向かうべきですから、これは正しい表現ではありません。そこで、SE39の値は負の値にしなければなりません。コードをご覧ください。
シミュレーション結果を下図に示します。当然ですが、BGSPの場合と一致しています。3プロットをまとめているので、少し見難いのですが、分離して見易くすることもできます。