
シミュレーションの演習
GS1:大型レーダーアンテナ
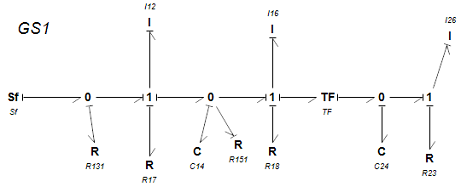
[1]の最初の例題ですが、これはボンドグラフの有効性のデモンストレーションとして出されているものと思われます。大型レーダーアンテナのボンドグラフであって、性能がシミュレーションと一致することが確認されたとされます。駆動用の交流電動機、トルクリミッタである滑りクラッチ、質量135トン、高さ68メートルのアンテナ構造物に相当する慣性、摩擦、コンプライアンスが表されています。このボンドグラフにおいて、エフォートはトルク、フローは角速度です。R151は滑りクラッチを、TFはギア比を示し、I26がアンテナの慣性モーメントを示しています。下図はボンドグラフです。 このボンドグラフでR13の関数FUNCはフロー側(片矢印のついている側)に関数が働くように表現されています。フローの関数としてエフォートが決定されます。これは誘導電動機の滑りを経験的に表現するためです。
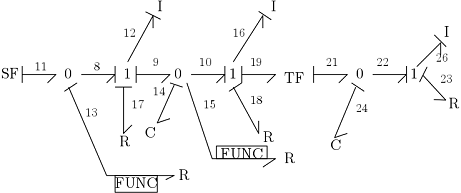
大型レーダーアンテナのボンドグラフ
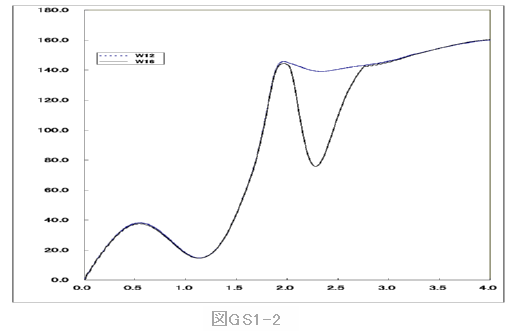
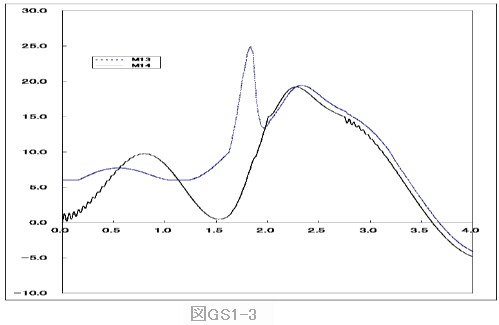
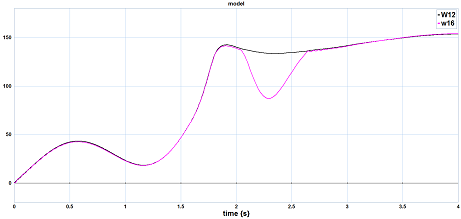
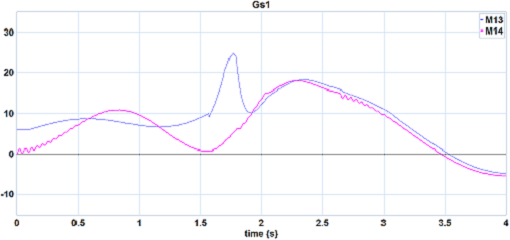
左図に駆動用の交流誘導電動機のボンドグラフを示します。この図はGS5と同型です。ボンド9のパワー(トルク×角速度)は滑りクラッチに伝えられます。C14はトルク伝達系のばね効果です。R18は摩擦を、I16は慣性モーメントを表します。図GS1-2、GS1-3にBGSPによるシミュレーション結果を示します。これは[1]のTUTSIMコードから推測して、BGSPのコードに変換し、シミュレーションしたものです。私が持っているソフトの制約からω12、ω16とM13、M14のグラフは合成できないので別々に表示していますが、ほぼ[1]と合致しています。 モータトルクM13にはピークが生じること、滑りクラッチR15はω12、ω16の回転数差からわかるようにこの装置に瞬間的な過大トルクを伝達しない機能があることが読み取れます。 図GS1-2の縦軸の単位は[Nm}であり、図1-3の縦軸の単位は[rad/s]です。
20-Simによるシミュレーション
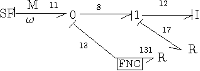
ここで20-Simを用いてシミュレーションをします。下図は20-simによるボンドグラフです。20-Simにはボンド番号を表示する機能はありませんが、分り易くするために各素子には上図のボンド番号を付与してあります。20-Simによるシミュレーションの利点はボンドグラフを直ちに20-Simにより表示できることです。関数機能はそれぞれの要素のコードに入ります。
20-Simによるボンドグラフ
図GS1-2、GS1-3と同様に回転角速度ω12、ω16及びトルクM13、M14を下図に示します。
ここで、ω12、ω16は要素I12、I16のフローであり、M13、M14は要素R13、C14のエフォートです。
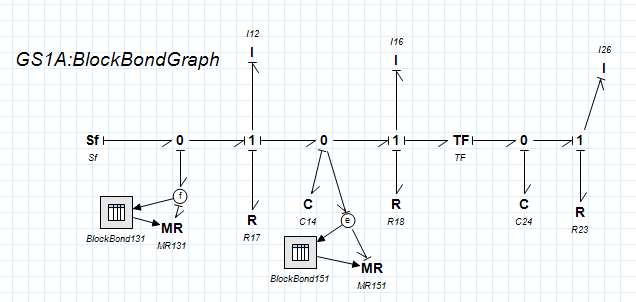
ブロックボンドグラフにより表示するシミュレーション
下図ではR131、R151はブロックボンドグラフにより表示されています。R131はエフォートがフローの関数であり、R151はフローがエフォートの関数となっています。このため、R131ではフローセンサーにより、フローを検出し、表BlockBond131の入力とし、出力をR131のエフォートとしています。R151については、エフォートセンサーを用い、表BlockBond151の入力とし、フローを出力としています。。R17は駆動モータの摩擦損失であり、I12はローターの慣性です。C14はシャフトのねじり弾性です。R151はすべり摩擦ですので、トルクであるエフォートの関数となります。R15はベアリングの摩擦力です。
表BlockBond131及び135についてはインターフェースの設定を表(a)、(b)のようにしなければなりません。
ブロック・ボンドグラフによる表示
(a)BlockBond131
(b)BlockBond151
シミュレーション結果は上と同一ですので省略します。