シミュレーションの演習
GS13:油圧ロボット
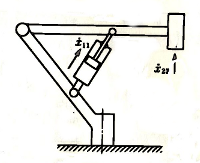 左図は2個の質量が可変トランスフォーマにより結合されている油圧ロボットの模式図です。このロボットでは
左図は2個の質量が可変トランスフォーマにより結合されている油圧ロボットの模式図です。このロボットでは(ピストン速度)と
(垂直方向の負荷速度)の間の変換比が可変であるリンク機構の運動です。このシステムではリンクは剛体としていますからボンドグラフでは微分性の因果関係となり、BGSPでのシミュレーションはできませんので20-Simとなります。
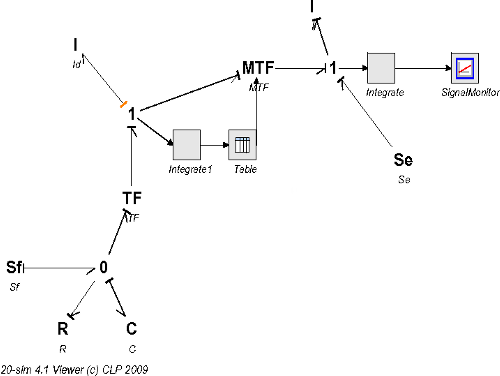
ボンドグラフを左下図に示します。このボンドグラフは20-Simの画面なのでボンド番号は表示されません。また、慣性質量のディスプレースメントの計算をするために積分計算機能を付加しています。速度が規定されてピストン質量が押し上げられるのでボンドグラフ要素のIは微分性となることがわかります。なお、単位系はコンパクト単位を採用しています。([1]p217〜218)コンパクト単位については別に解説します。
パラメータ表を以下に示します。
| 素子 | 数値 | 単位 | 出力変数 | 入力コード値 | |
|---|---|---|---|---|---|
| Sf | サーボバルブ | 800 | |||
| R | 漏れ抵抗 | 0.25 | 4.0 | ||
| C | 油の圧縮性 | 71.5E-03 | 71.5E-03 | ||
| TF | ピストン面積 | 400 | 400 | ||
| I | 負荷質量 | 100 | 負荷速度 | ||
| Id | ピストン質量 | 5 | 5.0 | ||
| MTF TABLE |
リンク機構変換比 |
入力 出力 |
|||
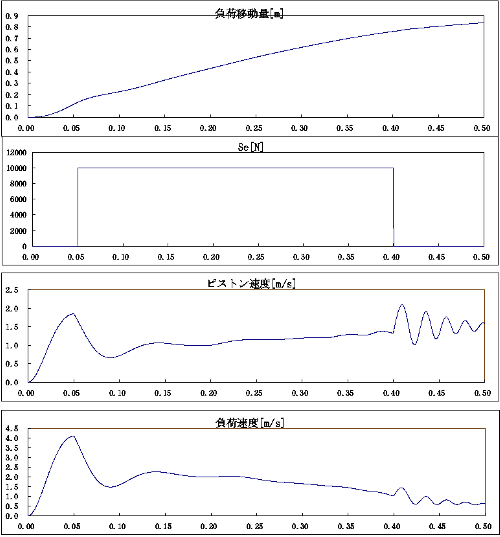
シミュレーション結果
シミュレーション結果を下に示します。10KNの衝撃負荷が0.05秒後に加えられ、0.4秒後に除去されます。衝撃負荷が作用するとどちらの場合も振動が生じますが、負荷を取り去る場合にはリンク比が変わるために振動が激しくなり、減衰が悪くなることがわかります。