Tips:8
ストップモーション
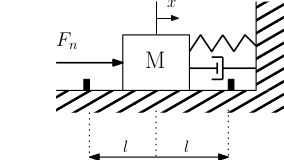
ストップのあるマスーばねーダンパー系の物理モデルを左図に示します。質量Mがストップにぶつかり停止するときには、運動エネルギーの一部はばねに吸収されます。残余はストップにぶつかることで、熱エネルギーとして放出されます。このような例は流体バルブが 閉鎖する場合などに、しばしばあることです。ストップの扱い方として、GS3のようにストップ点でばねが急速に堅くなると考えることもできます。しかし、この場合には、ばねの反発力により振動的になり、実際と異なる場合があります。ストップ点ではストップに加わる力が維持される限り、 反対方向の力が加わらないのであれば、ストップ点の位置は保持されるべきです。
下図は上の物理モデルのボンドグラフとブロックダイアグラムです。外力Fnはエフォート源SEから入力されるものとします。この図はボンドグラフの基礎9から引用しています。
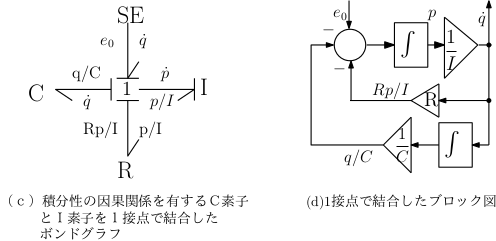
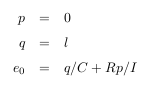
なお、ここでp=mv(運動量)、q=ディスプレースメント(変位)です。ストップ点では、次の式が成立していなければなりません。このためディスプレースメントqを検出し、pをリセットする必要があります。pのリセット時にはインパルス力が発生しますが、ストップ点で停止するときの衝撃力に相当します。また、運動量を計算する積分器入力を0 にしなければなりません。第3式は積分器入力を0にするためです。
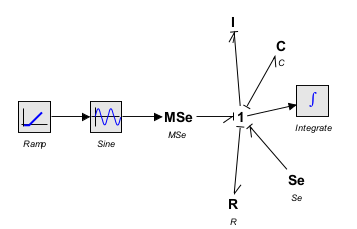
20-Simによるシミュレーション・ボンドグラフを左図に示します。このボンドグラフでは、単純なC-I-R要素に加えてSe要素を加えています。MSe要素に対する入力がやや複雑ですが、左右のストップ点にぶつかるように加わる力を振らせるためです。要素 "Integrate"はディスプレースメント(変位)を検出します。要素Seはストップ点で要素Iの入力を0に するためです。
シミュレーション
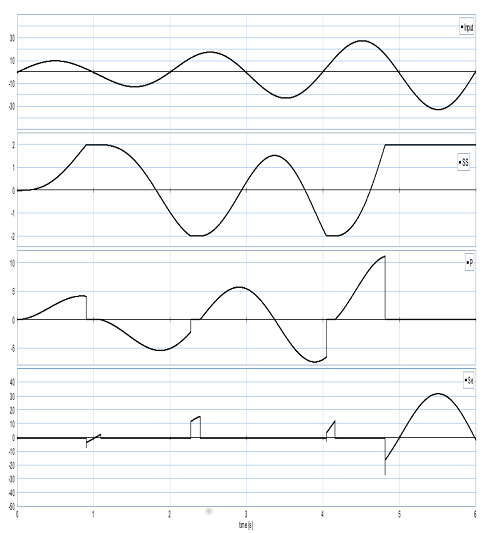
シミュレーションの結果は下図のとおりです。上から入力の力、変位、運動量、Seの発生する力です。変位は±2のストップ点で停止していることが見て取れます。運動量Pはストップ点で0になっていることも明瞭に見て取れます。このシミュレーションのコードはBGSA4にあります。