
シミュレーションの演習
GS5:誘導電動機の始動特性
誘導電動機の特性
| 電動機 | 発電機 | |
| 回転速度ω0 | ω0<ωs | ω0>ωs |
| すべりs | s >0 | s <0 |
| トルク | 回転方向 | 回転方向と逆方向 |
誘導電動機の特性は通常"トルク対滑り"としてあらわされます。誘導電動機の特性としては、ある定まった機械式クラッチにつながれた低速度源と同じような動作をします。トルクを発生しないときには、電源により定まった回転率で回転します。負荷がつながれ、駆動トルクが必要になると滑りが必要になります。誘導電動機は同期速度を越えて回転させると発電機として、機能します。つまり、同期回転速度を越えて回転させると、ブレーキ作用が働き、パワーは電源に戻るのです。表1のようにまとめられます。 ここで、ωsは同期速度を言います。すべりsは s=(ωs-ω0)/ωs により与えられます。即ち相対速度(ωs-ω0)と同期速度の比です。
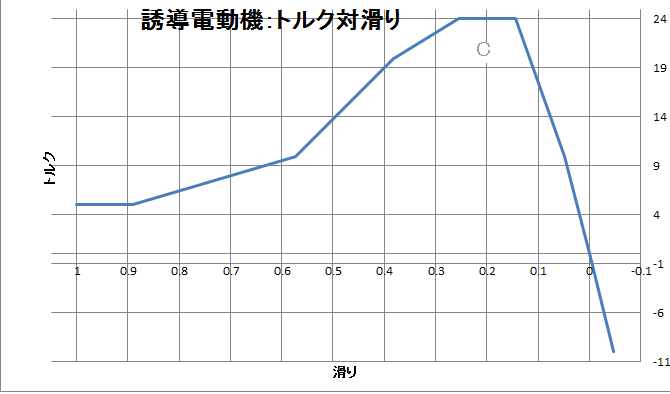
スタート時にはω0=0ですので、この時のトルクを始動トルクとします。速度が上昇するにつれ、すべりは減少しますが、トルクはほぼすべりsに反比例して増大します。最大トルクC点から滑り0までは滑りに比例して、トルクは減少します。滑り0でトルクも0となります。すべりが負になる状態は発電機として機能します。左図はこの項で与えられるブロックボンドグラフの特性表をトルク対滑りとして表示しています。この項での問題は特性図を与えて始動特性をシミュレートすることです。
誘導電動機の始動特性:ボンドグラフ
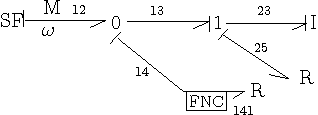
左図は電源SF12、ロータの慣性I23、ベアリングないし負荷の摩擦R25である誘導電動機のボンドグラフです。GS4とほぼ同形となっています。このボンドグラフも内部構造の解析をもとにしているというよりは特性シミュレーションの目的で作られていて、FNC14が実験値を反映しています。関数FNCは回転角速度に対するトルク特性、言い換えれば滑りとトルクの関係を示します。
シミュレーション結果
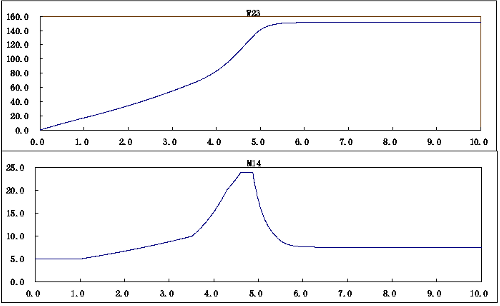
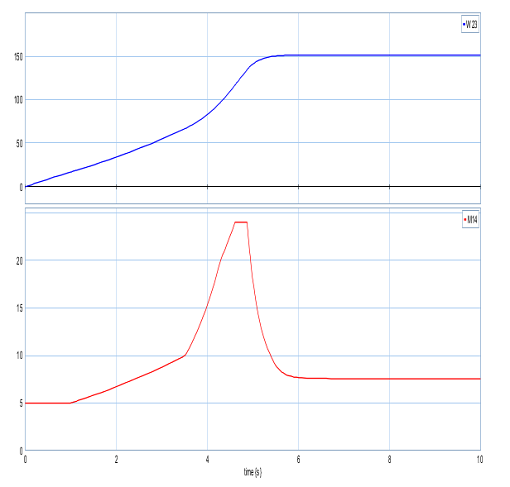
下図は起動時のシミュレーション結果を示します。ボンドグラフが特性シミュレーションを目的としていて物理的特性を模擬してはいないのでスタート直後のように非常に滑りが大きいときには電流が非常に大きくなりますので、このボンドグラフのような機械的特性をシミュレートするボンドグラフからは外れます。下図においてW23はローターの角速度であり、M14はトルクです。
20-Simによるボンドグラフ・シミュレーション
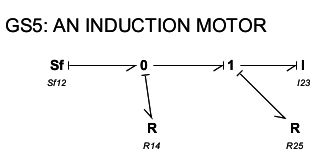
誘導電動機のボンドグラフを20-Simで表現すると左図のようになります。20-Simではボンド番号を要素名に付与しています。BGSPと異なりブロックボンドグラフが表示されませんが、これは20-Simではボンドグラフが自動的に表示されるためです。 ブロックボンドグラフの機能はコードに含まれています。ブロックボンドグラフについては非線形特性とブロックボンドグラフをご覧ください。
20-Simによるシミュレーション結果を下図に示します。BGSPと同一の結果が見て取れます。
誘導電動機のシミュレーション:20-Sim
ブロックボンドグラフによるボンドグラフの表現
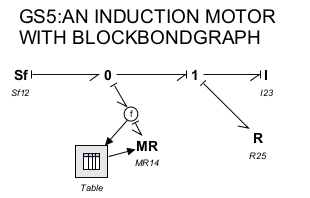
誘導電動機のボンドグラフをブロックボンドグラフを用いて表現すると左図のようになります。20-Simではボンド番号を要素名に付与しています。 ブロックボンドグラフはTABLEで表現されます。TABLEの入力はフロー(角速度)ですが、フローセンサーで検出します。TABLEの出力は要素MRのエフォート(トルク)となります。
ブロックボンドグラフで表現されたシミュレーション結果を下図に示します。当然ですが、BGSPと同一の結果が見て取れます。
誘導電動機のシミュレーション:20-Sim