
シミュレーションの演習
GS2:油圧サーボモータ
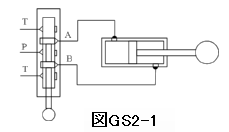
[1]の2番目の例題です。フィードバックのない油圧サーボモータの例です。この問題はGS7と同じです。ただし、GS7では位置信号フィードバックがある場合を取り扱います。左図に物理的概要を示します。左側圧力源(P)から戻り(T)への流れがスプール弁の位置により制御されます。スプール弁が上側に動けば、流れはPからAへBからTへとなります。下側に動けば逆の動きになります。スプール弁の位置に応じてピストンが移動し、負荷質量が移動します。
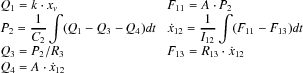
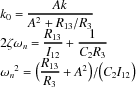
ここで、次のように記号を定めます。

式は次のようになります。
上式からストレートにブロック線図を描くと図のようになります。これは積分表示なので、MATLABあるいはSCILABでシミュレーションするのは容易でしょう。
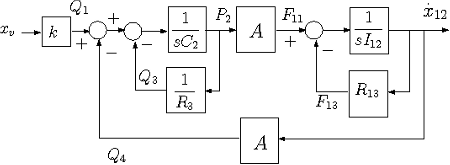
サーボ弁のブロック線図表示
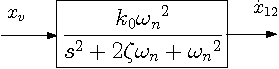
ブロック線図の等価変換の手法により変換すると下図のようになります。2次振動系の形ですから、この形であれば計算は公式を当てはめればよく、簡単です。
 |
 |
|---|
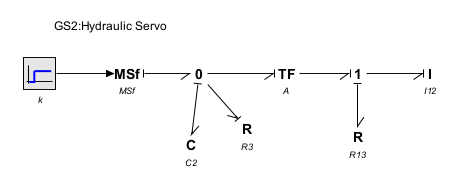
ボンドグラフ・モデル
ボンドグラフで表現すると下図のようになります。ここで、C,R、I等の値はブロック線図でR13であれば、ボンドグラフではボンド番号13のRに相当します。ただし、トランスフォーマTFはピストン断面積Aに相当します。次の点に着目します。
- スプール弁内の圧力 同一圧力ポイントに対して流量の流入、流出があるのでこれを"0"ジャンクションとします。
- ピストンの移動速度 ピストン周りの力に着目します。

サーボ弁のボンドグラフ
シミュレーション結果
シミュレーションの結果を下に示します。P2はボンドグラフ図におけるゼロジャンクションのエフォートであり、ブロック線図のP2です。またV12はボンドグラフにおけるボンド番号12のフローであり、ブロック線図の
です。
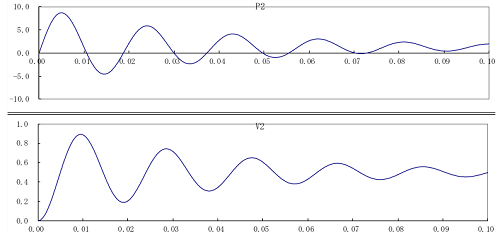
サーボ弁のボンドグラフ・シミュレーション
20-Simによるボンドグラフ・シミュレーション
サーボ弁のボンドグラフを20-Simで表現すると下図のようになります。20-Simではボンド番号が表示されません。各要素にボンド番号を付与します。
サーボ弁のボンドグラフ:20-Sim
20-Simによるシミュレーション結果を下図に示します。積分方式は"Modified Backward Differentiation Formula"とし、Event deltaは1e-006としてあります。
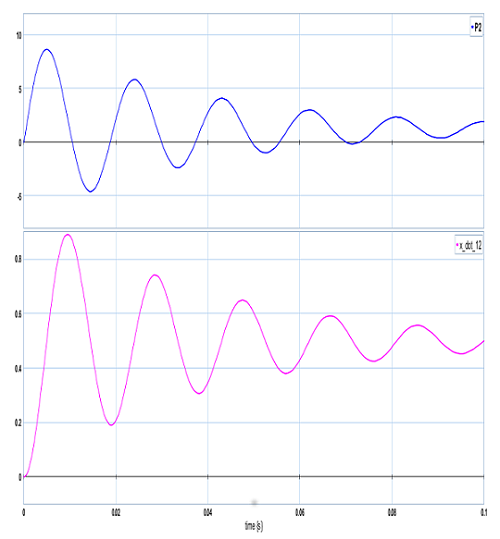
サーボ弁のボンドグラフ・シミュレーション:20-Sim