
いろいろな話題:4
スティックスリップ摩擦モデル
摩擦は相互に接触し、運動する物体間で必ず見られる現象です。運動体の間に摩擦が存在すると、好ましくない動作を生じることがあります。シミュレーションにより運動を把握することが望ましいのですが、クーロン摩擦などのような 非線形性が著しい摩擦特性では 、計算そのものが必ずしも容易ではありません。この項では、摩擦力一般の解説はしませんが(参考)、スティックスリップ摩擦と呼ばれる現象をボンドグラフによりシミュレーションする 方法を述べます。スティックスリップ摩擦とは、スティック(停止状態維持)とスリップ(滑り)を繰り返す現象であり、機械システムでしばしばみられます。スティックスリップ摩擦はチャタリングなどの好ましくない現象を生じることがあります。
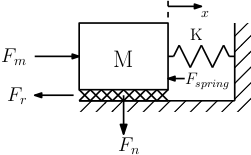
上図はスティックスリップ摩擦の物理モデルです。運動方程式は左のようになります。水平面上を滑るブロックの一端に圧縮ばねを取付け、左端から外力Fmを作用させます。これは基本的にばねマス系なので外力に比例した位置をとります。しかし、摩擦がありますので、作動は非常に複雑になります。 ブロックと床面の間には、摩擦力Frが働き、ブロックが動き出すには外力Fmが摩擦力に打勝つ必要があります。
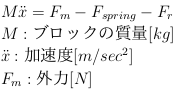
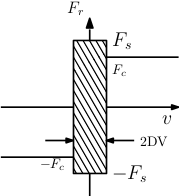
| 左図は摩擦力をクーロン摩擦としたときの摩擦力のモデルです。クーロン摩擦力は接触面に垂直に働く力Fnに比例し、接触面の大きさに関係しないとされます。静止状態における最大摩擦力を静止摩擦力(Fs)とし、動き出してからの動的摩擦力をFcとします。
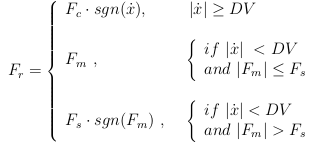
動的摩擦力の大きさは速度の方向にのみ依存し、速度の大きさには関係しません。クーロン摩擦力Frは次式のように表わされます。
速度が0の時には外力Fmが静止摩擦力Fsを越えない限り、静止状態が保たれます。この状態はPresliding状態といいます。 |
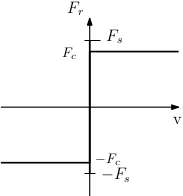
また、sgn(.)関数は左の式のように定義されます。の付近において、摩擦力Frの値が大きく変化しますので線形化も難しく、計算は困難です。この困難を解決するために、
ここではKarnoppモデル[6]によりシミュレーションすることとします。
Karnopp摩擦モデル
| 左図はKarnopp摩擦力のモデルです。 DVは微小とします。|v|がDVを越える瞬間でも|Fr|→Fcですから極端な変化はなく、計算上の無理がありません。 |
ボンドグラフによるシミュレーション
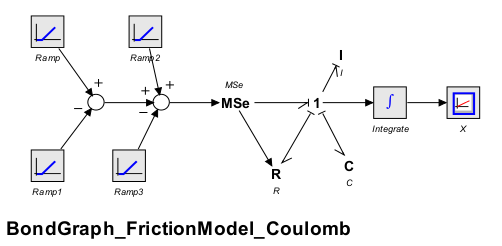
20-Simによるボンドグラフを上に示します。図においてCは物理モデルで示したばねであり、ばね常数はKとなります。 Rは摩擦力Frです。シミュレーション実行のための定数を左に示します。シミュレーション結果を下に示します。外力Fmの増大・減少に応じて、速度の急激な増大・減少(スリップ)、停止(スティック)を繰り返していることが分ります。コードはBGSA5にあります。
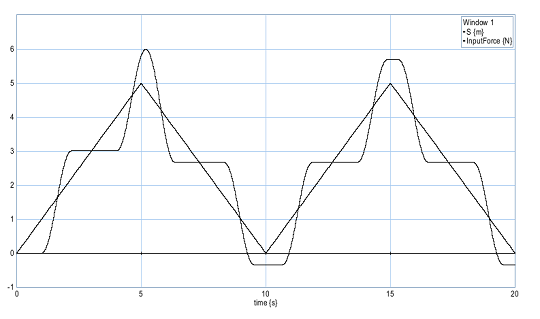
スティックスリップ摩擦の挙動:外力(Fm)対位置(x)
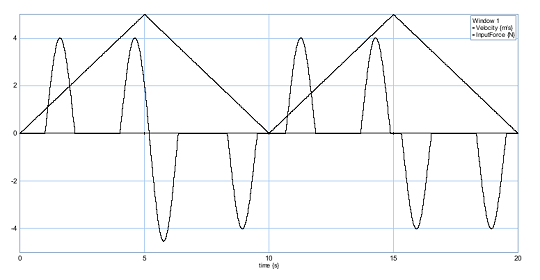
スティックスリップ摩擦の挙動:外力(Fm)対速度(v)
| 前のページ<< | >>次のページ |