
いろいろな話題:5
Karnopp摩擦モデル
 前項では、摩擦モデルとしてクーロン摩擦を取り上げました。Karopp摩擦モデルは対象を拡張することができます。
前項では、摩擦モデルとしてクーロン摩擦を取り上げました。Karopp摩擦モデルは対象を拡張することができます。
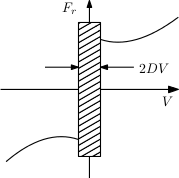
付近では摩擦力は静止摩擦力であり、
ではストライベック曲線(参考)を含むようにできます。左に示す摩擦曲線が実現したいものです。
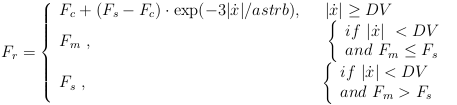
数学モデルは下記のようになります。
が増大すると、FrはFcに近づきます。
ボンドグラフによるシミュレーション
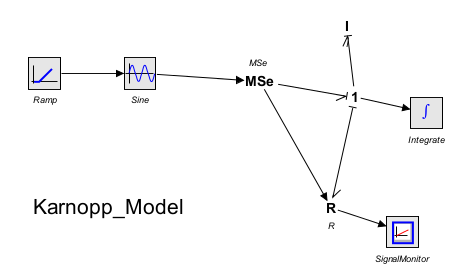
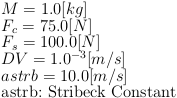
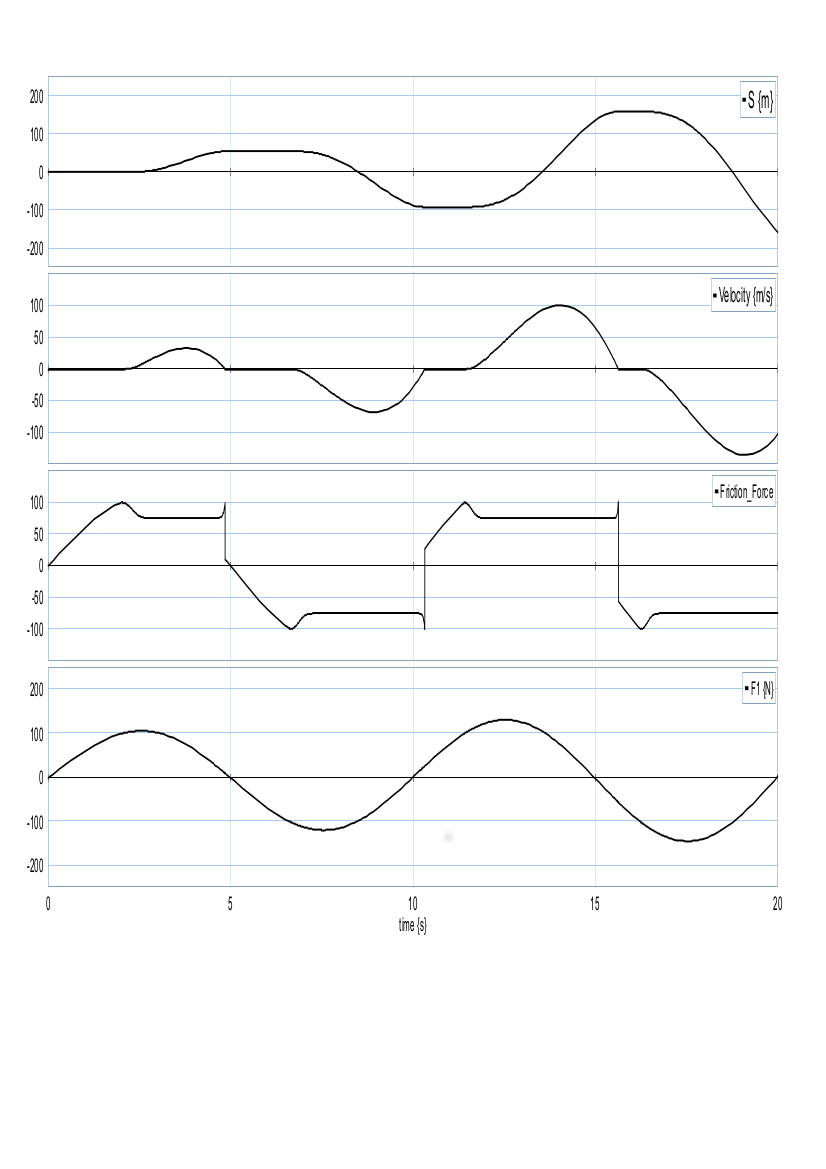
20-Simによるボンドグラフを上に示します。 Rは摩擦力Frです。シミュレーション実行のための定数を左に示します。Ramp関数とSine関数を組み合わせて入力の外力を決めています。外力がやや複雑な構成になっているのはスティック・スリップを繰り返すように プログラムしているためです。ストライベック常数を10.0にしているので、クーロン摩擦モデルにかなり近いシミュレーションとなっています。シミュレーション結果を下に示します。上段から移動距離[S]、速度[V]、摩擦力[Fr]、外力{Fin]となっています。外力Finの増大・減少に応じて、速度の急激な増大・減少(スリップ)、停止(スティック)を繰り返していることが分ります。コードはBGS6にあります。
| 前のページ<< |