
いろいろな話題:3
直巻直流電動機の回転数制御
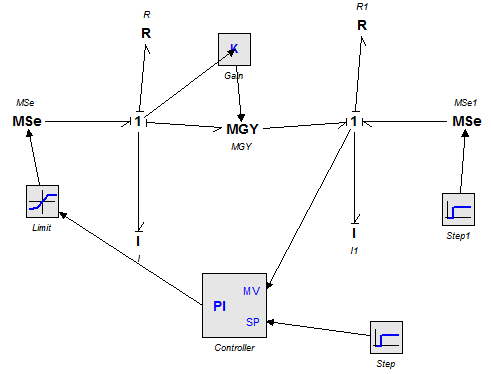
ControllerはPI制御器としました。Mse1は負荷です。負荷がなければ電動機は慣性により回転を維持するからです。入力電圧の変化だけでは、減速しません。"Limit"はモーターへの最大電圧を制限するためです。始動時には負荷をかけず、2秒後に負荷をかけます。制御器に接続される"Step"は回転速度の目標値を与えます。ここでは、100[rad/s]としました。
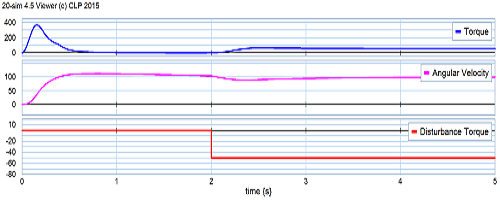
シミュレーション結果
シミュレーション結果を示します。始動時にトルクが急激に増大しますが、直に100[rad/s]に整定することが読み取れます。2秒で負荷がかけられると、負荷に見合うトルクが増大し、回転数も元に戻ります。
20-SimのコードをBGSA3に記載します。
| 前のページ<< | >>次のページ |